论文简介
- 地址:Towards End-to-End Lane Detection: an Instance Segmentation Approach
- 传统的车道线检测方法十分依赖人工选取特征,需要大量的后处理步骤,对于已经有的一些DNN的方法,它们只能处理预先定义好的、数目固定的车道线,无法处理车道线发生变化的情况。
- 引入instance segmentation的方法,将每个车道线都视为一个instance,论文中提出一种使用学习得到的透视变换方法,保证模型在路面发生变化时也会有较强的鲁棒性。
- 论文提出的方法可以处理任意车道线数目、车道线变化的情况,同时能够做到实时(50fps,图像大小为512X256,Nvidia 1080Ti)。
论文主要的组成部分
LaneNet
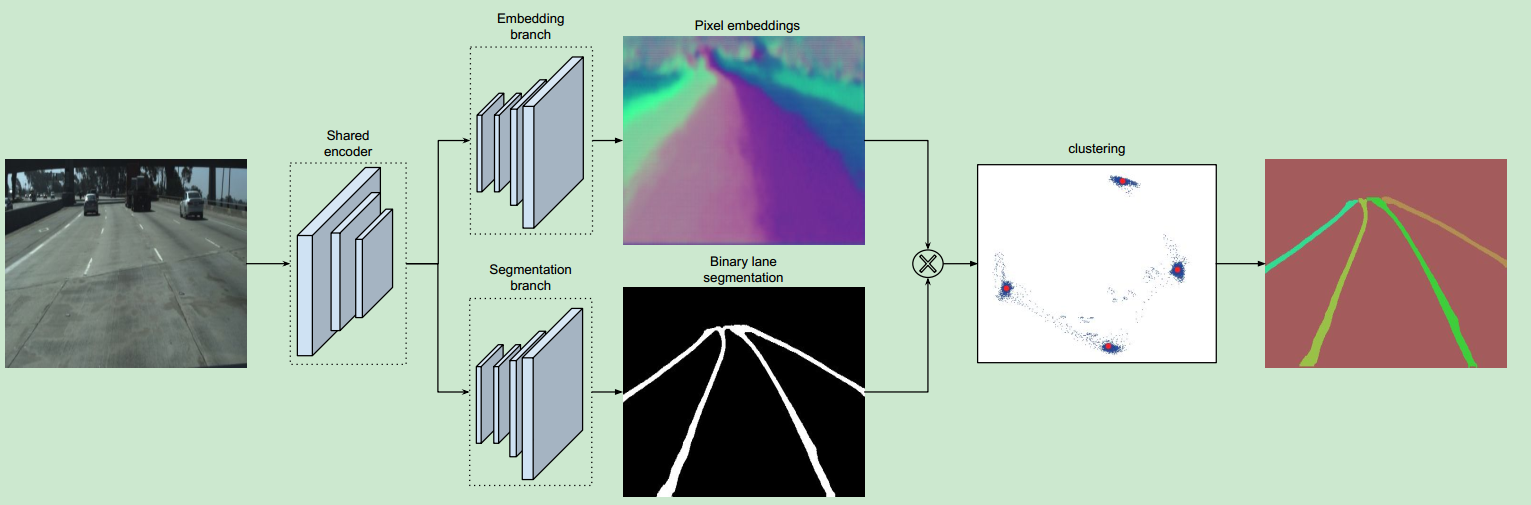
- 网络结构如下图。使用一个共享的encoder,对输入图像进行处理,得到2个branch:嵌入branch和语义分割的branch。嵌入branch可以将不同的车道线区分为不同的instance;因为只需要考虑车道线,因此语义分割的结果是二值化图像;然后对2个branch做聚类,最终得到结果。
基于学习方法的投影变换方法()H-Net
- 将输入的RGB图像作为输入,使用LaneNet得到输出的实例分割结果,然后将车道线像素使用H-Net输出得到的透视变换矩阵进行变换,对变换后的车道线像素在变化后的空间中进行拟合,再将拟合结果经过逆投影变换,最终得到原始视野中的车道线拟合结果。
- H-Net将RGB作为输入,输出为基于该图像的透视变换系数矩阵,优化目标为车道线拟合效果。
关于嵌入
- 嵌入的方法与https://arxiv.org/abs/1708.02551中介绍的类似,只是修改了hinge loss的阈值,设置为$\delta _v > 6\delta _d$。